产品中心

| 名称: | 新能源点胶压合项目技术方案(方案二:点胶口琴管) |
|---|---|
| 名称: | 新能源点胶压合项目技术方案(方案二:点胶口琴管) |
| 产地: | 合肥市 |
| 产地: | 芜湖市 |
| 产地: | 马鞍山市 |
| 产地: | 宣城市 |
产品描述
合肥双合智能科技有限公司
合肥双合智能科技有限公司
主要经营智能设备、机器人、电子产品、气动元件、液压设备、传动配件、
五金交电、仪器仪表、工量刃具、热能设备、电力设备、电线电缆、
通讯设备及配件的研发、销售及售后服务
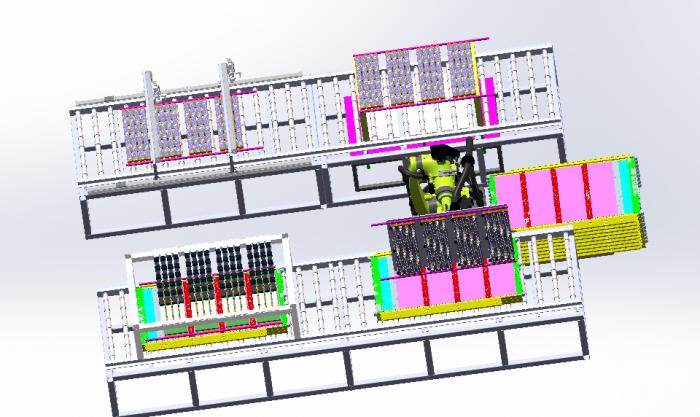
新能源点胶压合项目技术方案(方案二:点胶口琴管)

整体布局
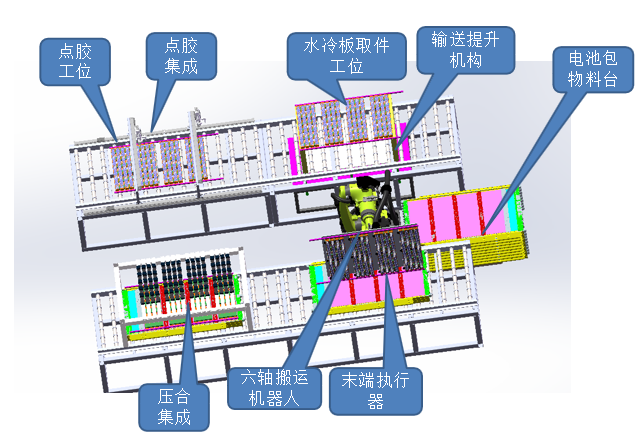
点胶工位
搬运压合工位
六轴搬运机器人
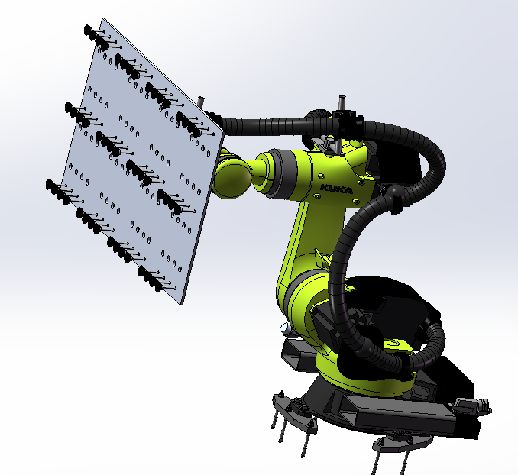
备注:
六轴搬运机器人,臂展2000左右,
负载50-100KG。重复定位精度0.5左右。
考虑到复合精度要求不是很高,可以
选择国产机器人。比较稳定的品牌
有埃斯顿,配天。性价比高,稳定性好
的建议上海图灵或者华数。
建议加第七轴地轨,可以实现无人化生产
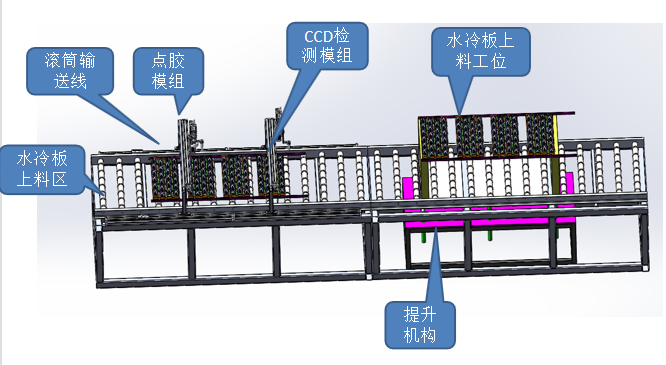
工艺流程
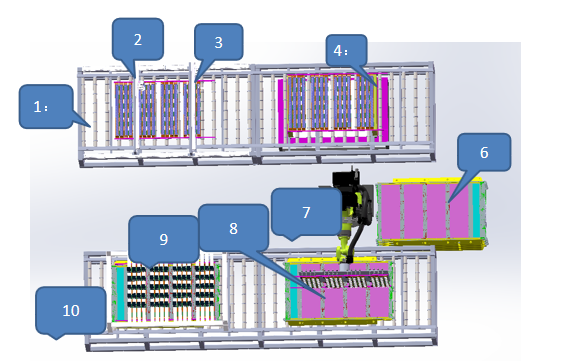
流程介绍:人工在1区上料水冷板,输送线边输送边点胶,然后3CCD检测,然后输送至
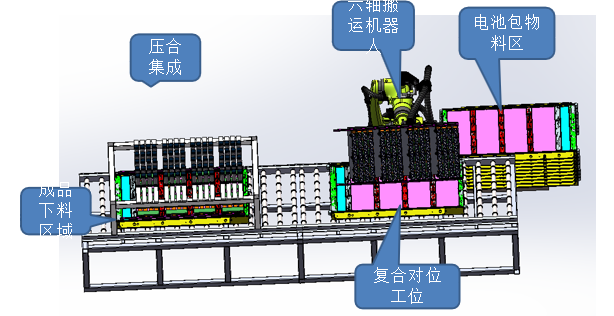
4上料工位,提升机构升起,同时机器人在上料区域拾取6电池包,放置8复合对位区域。
同时从机器人提升底部拾取水冷板,放置8复合对位区域电池包上部。完成之后输送至
9压合区域.压合三分钟后输出,进行下一工位成品检测。依次进行(
备注:机器人增加第七轴地轨,可以实现无人上下料,包括水冷板,电池包,成品上下料

点击次数: 【打印】
上一个:微型马达焊锡点胶方案设计 下一个:智能焊接设备简介及需求技术方案
相关产品

电机轴的智能生产线技术方案...
安徽省合肥市/芜湖市/马鞍山市/宣城市/蚌埠市/ 淮南市/提供电机轴的智能生�...
更多 >>
自动钣金上下料料仓项目技术方案...
安徽省合肥市/芜湖市/马鞍山市/宣城市/蚌埠市淮南市提供自动钣金上下料料...
更多 >>
回转支撑自动化自动化方案设计...
安徽省合肥市/芜湖市/马鞍山市/宣城市/蚌埠市淮南市提供回转支撑自动化自...
更多 >>
卷帘门转动轴焊接打磨专机技术方案...
安徽省合肥市/芜湖市/马鞍山市/宣城市/蚌埠市淮南市提供卷帘门转动轴焊接...
更多 >>