
| 名称: | 电机轴的智能生产线技术方案 |
|---|---|
| 名称: | 电机轴的智能生产线技术方案 |
| 产地: | 合肥市 |
| 产地: | 芜湖市 |
| 产地: | 马鞍山市 |
| 产地: | 宣城市 |
| 产地: | 蚌埠市 |
产品描述
合肥双合智能科技有限公司
主要经营智能设备、机器人、电子产品、气动元件、液压设备、传动配件、
五金交电、仪器仪表、工量刃具、热能设备、电力设备、电线电缆、
通讯设备及配件的研发、销售及售后服务
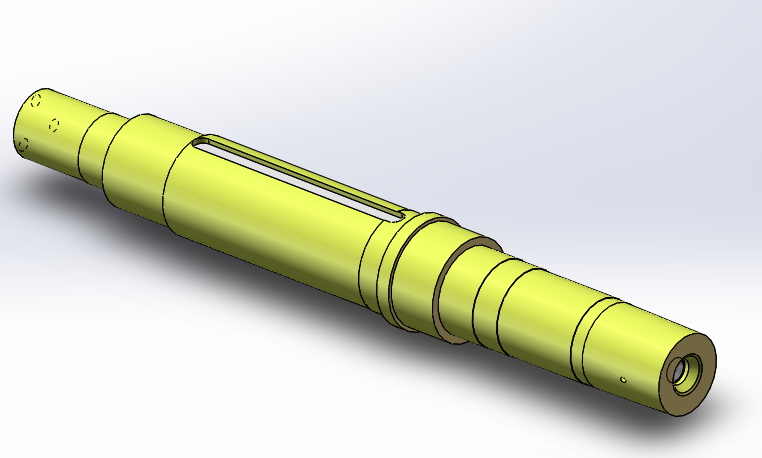
电机轴的智能生产线技术方案

一、项目需求及现状

1.实现永济电机机加车间工件加工自动化、信息化柔性智能。采用机器人与机床结合的加工方式,优化工艺流程。
2:A:我方提供方案、材料、施工、售后,自动上下料,提高工作效率。B:导轨倒挂 式 + 行走机器人.
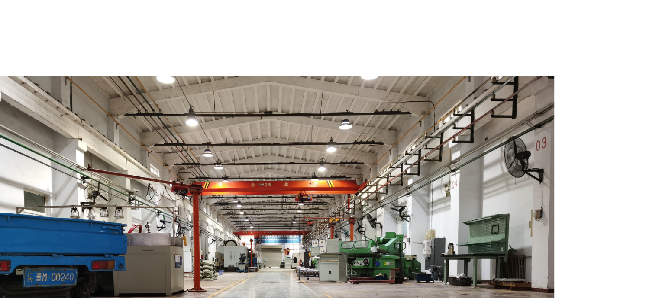
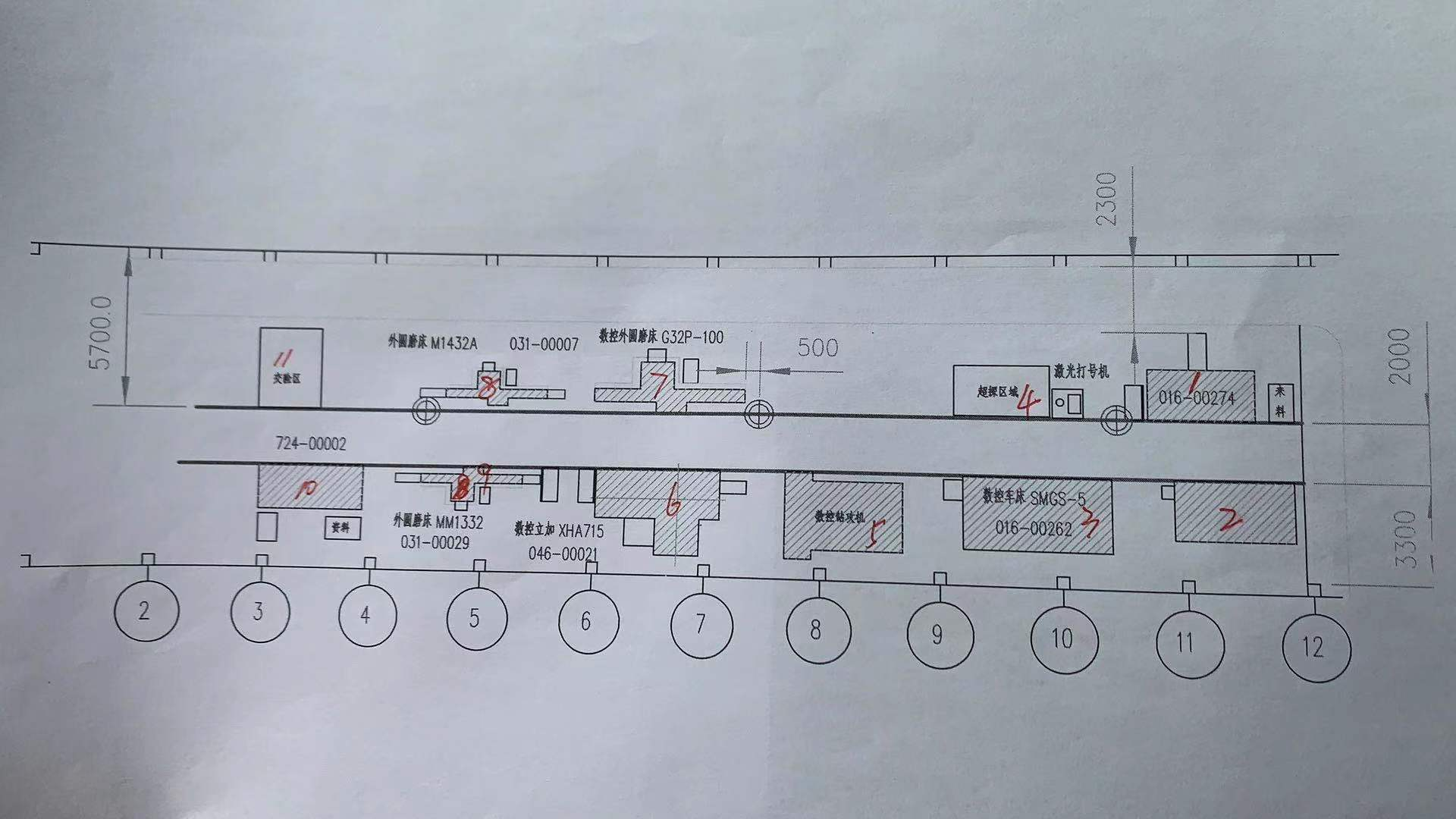
3:现场地面积为长60米,宽11米。中间人通道为2米。(如图2)
4:目前采用电动葫芦人工吊装方式上料,产品重量为20-40KG之间,一共11道工站。
5:目前有三台数控车床,一套数控打码机,一台数控钻攻机,一台立式加工中心,三台数控磨床。
方案概况
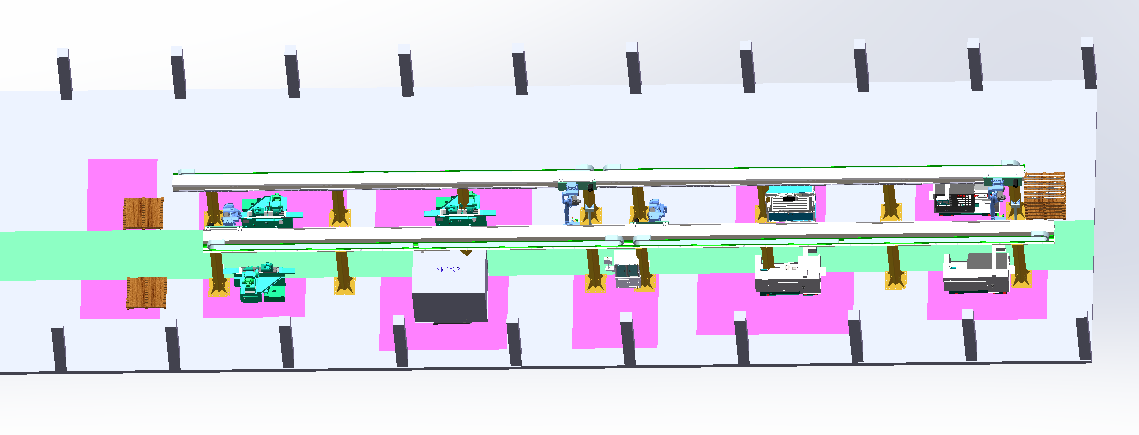
该项目主要有机器人吊装行走轴,安川机器人,桁架两轴码垛机械手,周转台组成。(后期可以考虑AGV上料车和MSN数据采集系统。项目占地面积为35米X12米X3米(长X宽X高)zho
1、设备效果示意图:
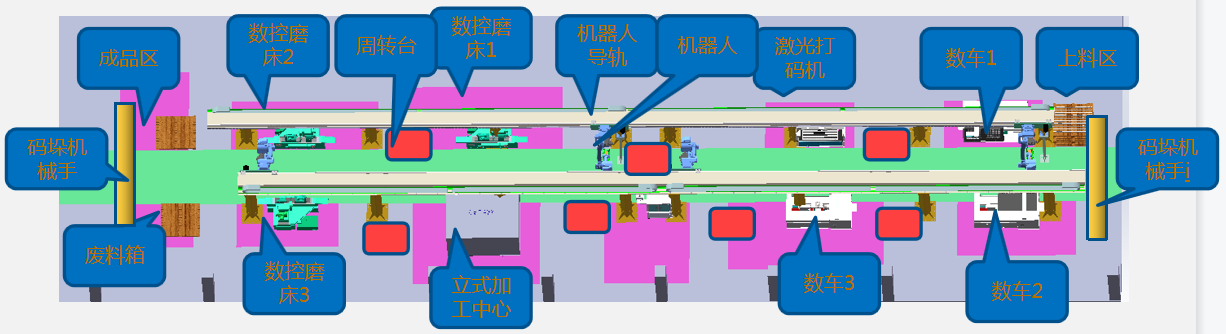
设说明:
1:码垛托盘需要定制。码垛机械手为非标定制产品,机器人轨道为五米一组拼装而成,合计70米。
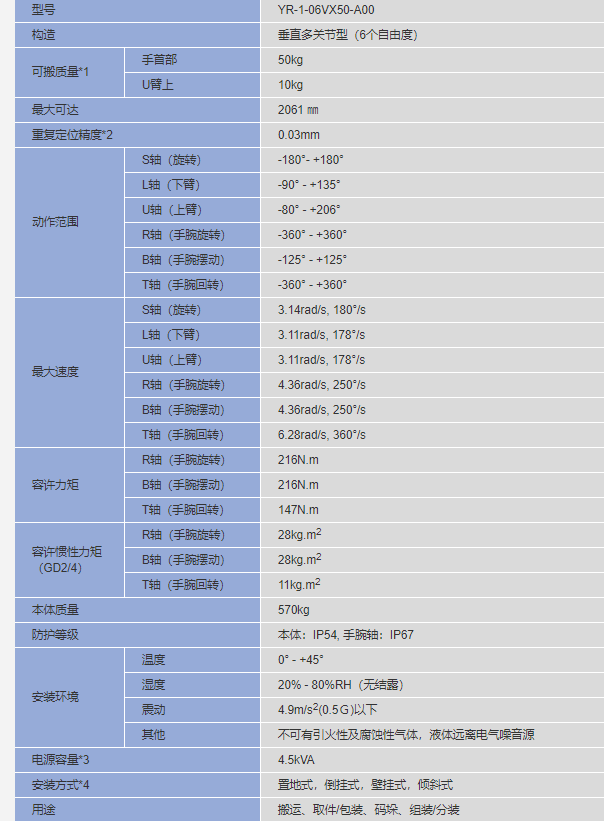
2:机器人采用库卡负载50公斤
项目分析(原料托盘)

备注:
1:托盘采用1400X1200(MM),木制或者塑料定制。
2:一般可以放置6个托盘,数量为60件。
项目分析(码垛机械手)
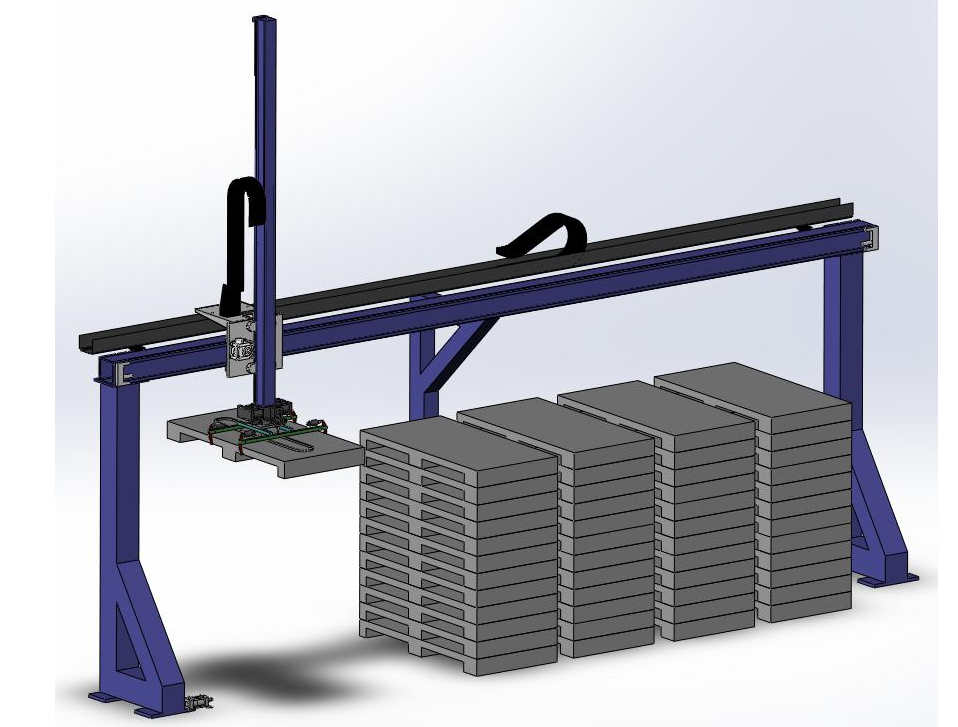
备注:
码垛机械手主要用于上料及下料区托盘拆垛托盘使用。X轴有效形成4米,Y轴上下有效形成为2米。负载为20KG。非标定制,数量两套。
一:机器人行走轴

机器人行走轴采用纽氏达特吊装行走轴。有效行程34米,总长35米,重复定位精度正负0.1。速度1M/S.形式如图。
机器人(安川GP50)

机器人夹爪

备注:
1:采用凸轮机械移栽机构,一个主轴电机完成取料,移栽,定位,预计在2秒之内完成。
2原理附视频:
工艺流程
 ·
·
备注:
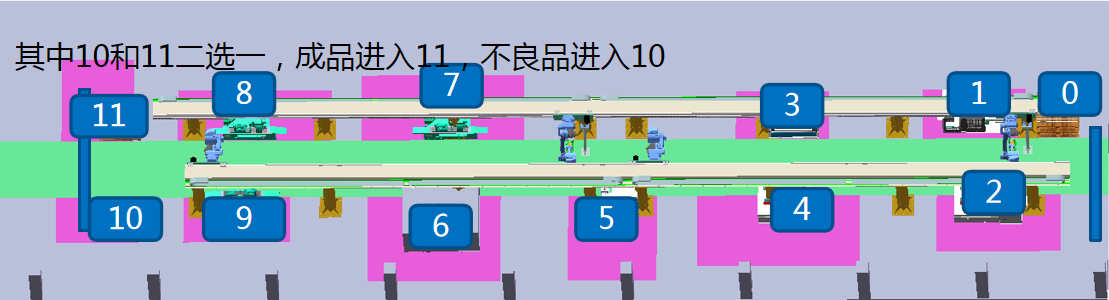
一:人工将原料放置指定区域,有机器人拾取工件放置数车1,待装夹完成,返回上料区拾取第二件工件,等待数车一工件加工完成。预计时间为合计6分钟。
二:待数车一工艺完成,机器人夹爪一拾取完成工件,放置第二件工件,待装夹完成,机器人将第一工件放置数车4中。待装夹完成,机器人返回上料区拾取第三件工件。等待数车1加工完成,拾取数车一工件,放入第三件工件,待装夹完成,机器人移至数控车2中,待数控车2工件完成,拾取工件,放置数车一半成品工件。预计时间5分钟。
三:从工位0至工位10依次进行。(具体逻辑流程,需要根据产品加工工艺修改)。

相关产品

自动钣金上下料料仓项目技术方案...
安徽省合肥市/芜湖市/马鞍山市/宣城市/蚌埠市淮南市提供自动钣金上下料料...
更多 >>
回转支撑自动化自动化方案设计...
安徽省合肥市/芜湖市/马鞍山市/宣城市/蚌埠市淮南市提供回转支撑自动化自...
更多 >>
卷帘门转动轴焊接打磨专机技术方案...
安徽省合肥市/芜湖市/马鞍山市/宣城市/蚌埠市淮南市提供卷帘门转动轴焊接...
更多 >>
微型马达焊锡点胶方案设计...
安徽省合肥市/芜湖市/马鞍山市/宣城市/蚌埠市淮南市提供微型马达焊锡点胶...
更多 >>